ABOUT ME
I'm Eduardo Grifo, an experienced Robotics Engineer with over 6 years of hands-on experience in both research and
industry. I specialize in C/C++ and Python programming languages and have extensive experience with computational
mathematics and hardware and software development, including lidar-based systems, signal processing, automation,
control, rigid body dynamics, custom Linux environments, and embedded sensing systems. I possess valuable insights
from over 3 years as a research engineer at Fraunhofer Portugal AICOS and almost 4 years as a Senior Robotics
Engineer at BladeInsight. I consider myself a team player and someone passionate about learning and leveraging
that knowledge and skills to create solutions in the engineering and technology fields.

I'm a multifaceted engineer with a knack for diving into complex challenges and emerging as a key
contributor. My toolbox counts with the presence of languages and technologies like C/C++, Python, Bash, Git,
ROS, Linux, and has been my constant companion in crafting innovative solutions. I am someone highly focused
on providing high quality code by applying tools like static checkers, unit testing (gtest), continuous
integration and deployment, all while adhering to best coding practices.
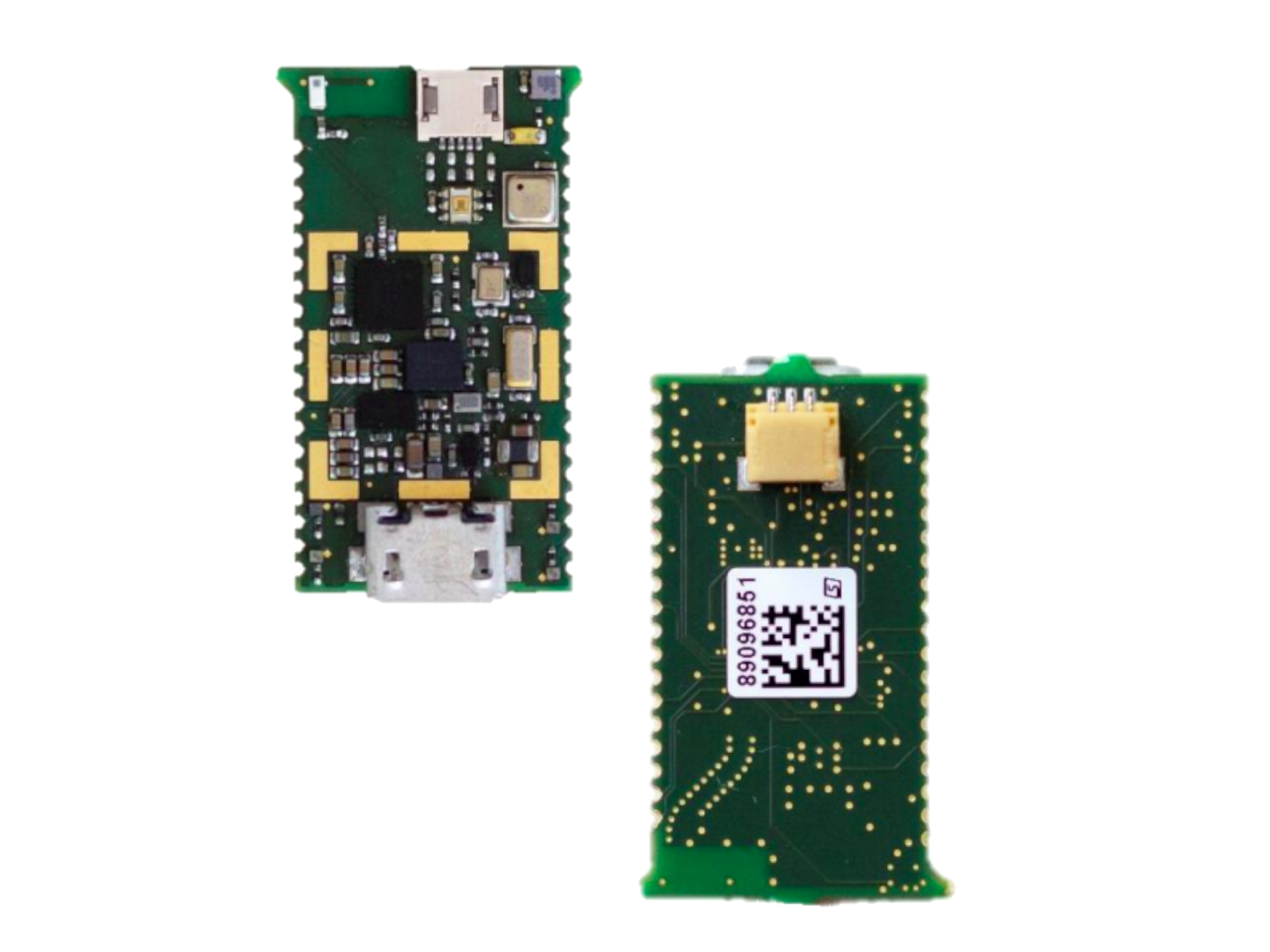
At Fraunhofer AICOS Portugal, I had the opportunity to work in projects related with embedded systems and IoT
applications working with tools such as Q format numbers and Yocto.
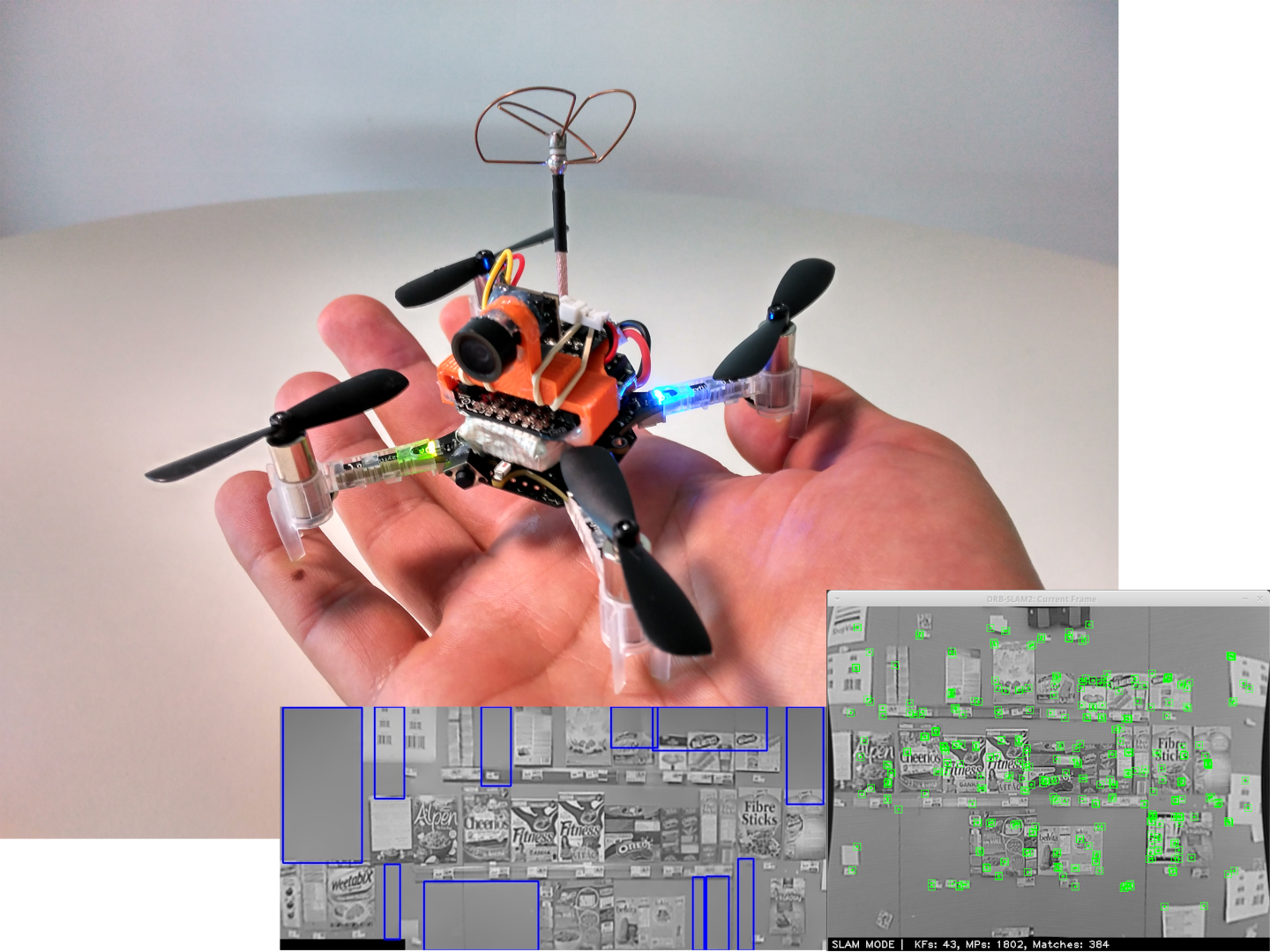
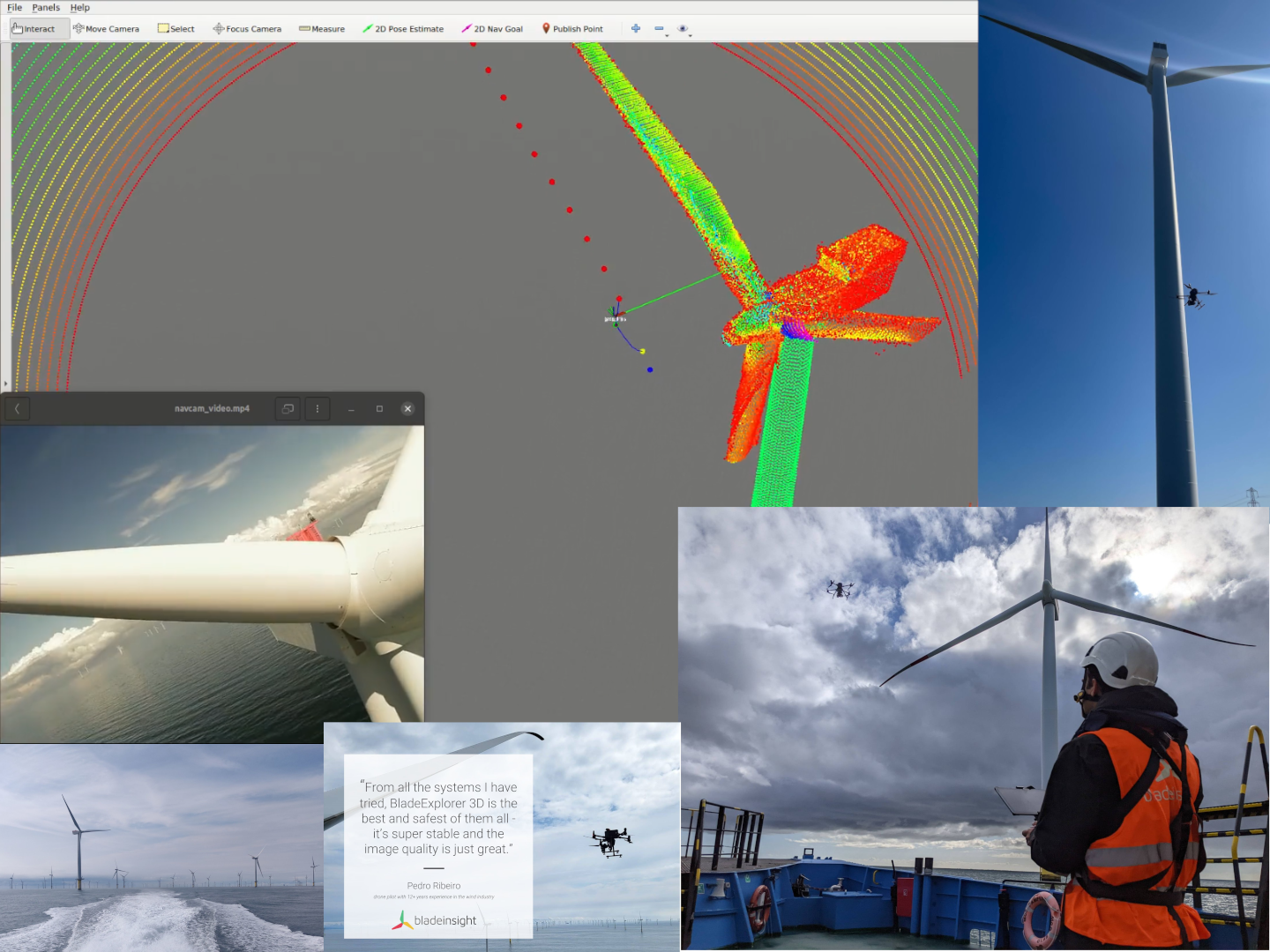
In my role as a Senior Robotics Engineer at BladeInsight, I further expanded my skillset with specialized
tools like the PCL library, the Ceres optimizer, Orocos and others.
I believe my professional journey has been a path of continuous learning and growth and I'm eager to
contribute this accumulated knowledge and experience to any future endeavor.
I'm really good at:
Robotics
Embedded Systems
Software and Hardware Development
SW & HW Development
Linux
C/C++
Python
Bash
Computational Math
Math
"Eduardo demonstrated an impressive level of skill, dedication
and professionalism that made him an invaluable member of our team. (...) He is a flexible and organised person
that often exceeds expectations."
"Eduardo demonstrated an impressive level of
skill, dedication and professionalism that made him an invaluable member of our team."
Filipe Sousa - Head of Connected Things at Fraunhofer AICOS
"I can only recommend Eduardo Grifo as an exceptional
problem-solver and an inspiring team member to work with. He's the one who made it through many times when
others said it was not possible. I am confident that he will bring immense value to any future organization, as
he did at BladeInsight."
"I can only recommend Eduardo Grifo as an
exceptional problem-solver and an inspiring team member to work with. He's the one who made it through many
times when others said it was not possible."
Illia Sheremet - Head of Robotics at BladeInsight
(Click on the images to expand them)
Professional career
Personal projects